研究テーマ
当研究室では、ロボティクス、ディープラーニング、コンピュータビジョンを融合させた知能システムの研究開発に取り組んでいます。インテリジェント空間、自律ナビゲーション、3Dグラフィックスコンピューティングなど幅広い分野への応用を通じて、持続可能で人間中心の未来社会の実現に貢献することを目指しています。
ON-GOING
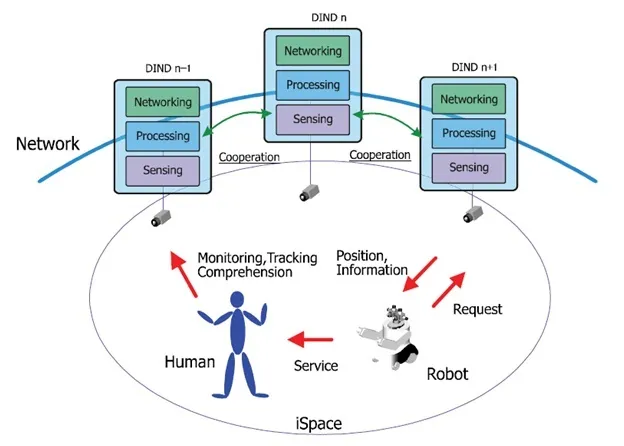
空間知能化(Intelligent Space)
空間知能化とは、空間内で生活している人の状況や、これまでの行動を基に、ロボットやアプリケーションを通して適切なサービスを能動的に提供する賢い空間「知能化空間」を作る研究です。機械学習、ロボティクス、画像処理等の幅広い要素技術を組み合わせて研究を行っています。
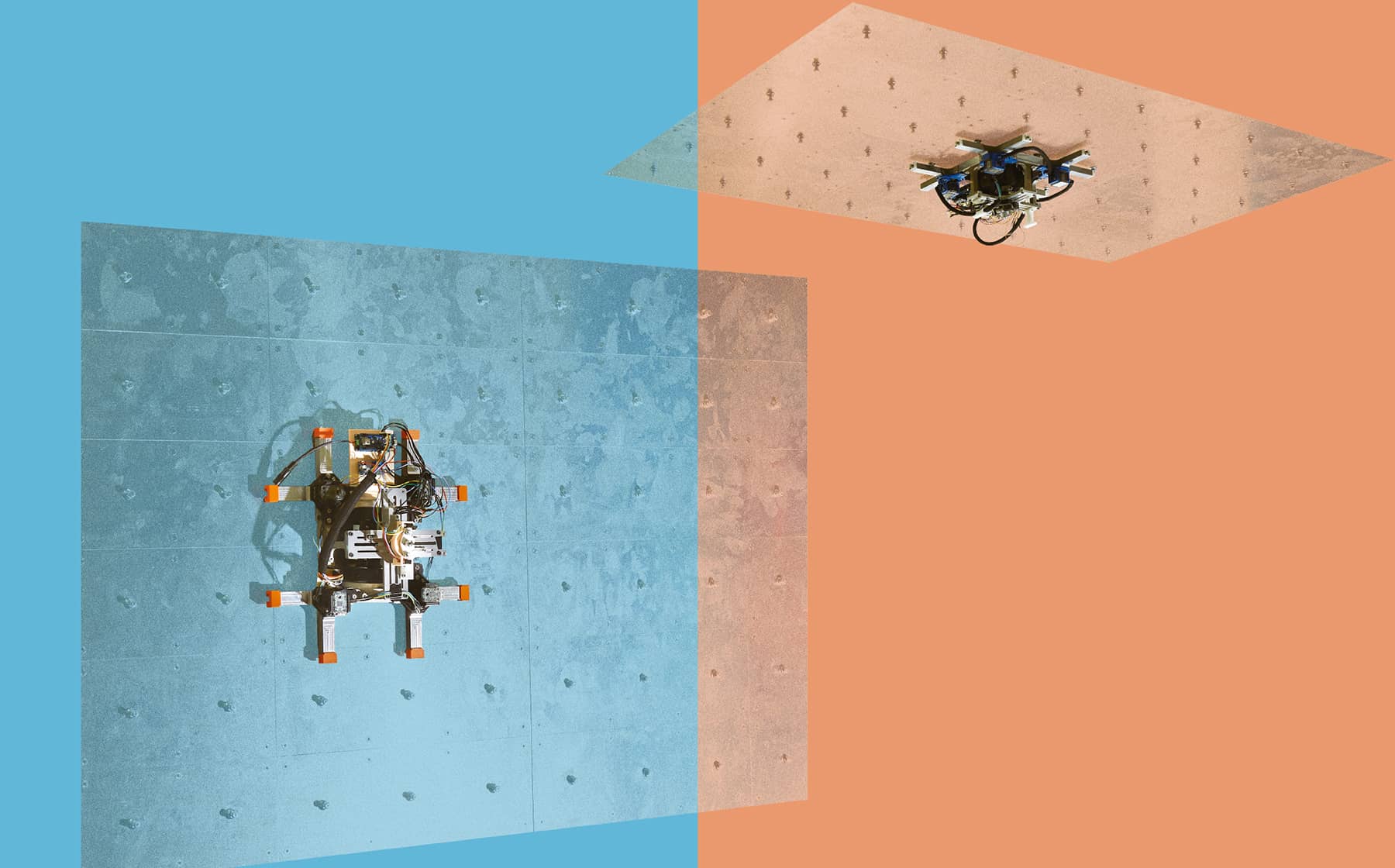
Mobile Module
MoMoは、知能化空間内において、サービスを提供するためのデバイスを移動させることを目的としたロボットです。天井を移動することで、ユーザの邪魔にならないように天井面を移動することができます。より効率的な移動を実現するために、機構の改良や制御アルゴリズムの研究を行っています。
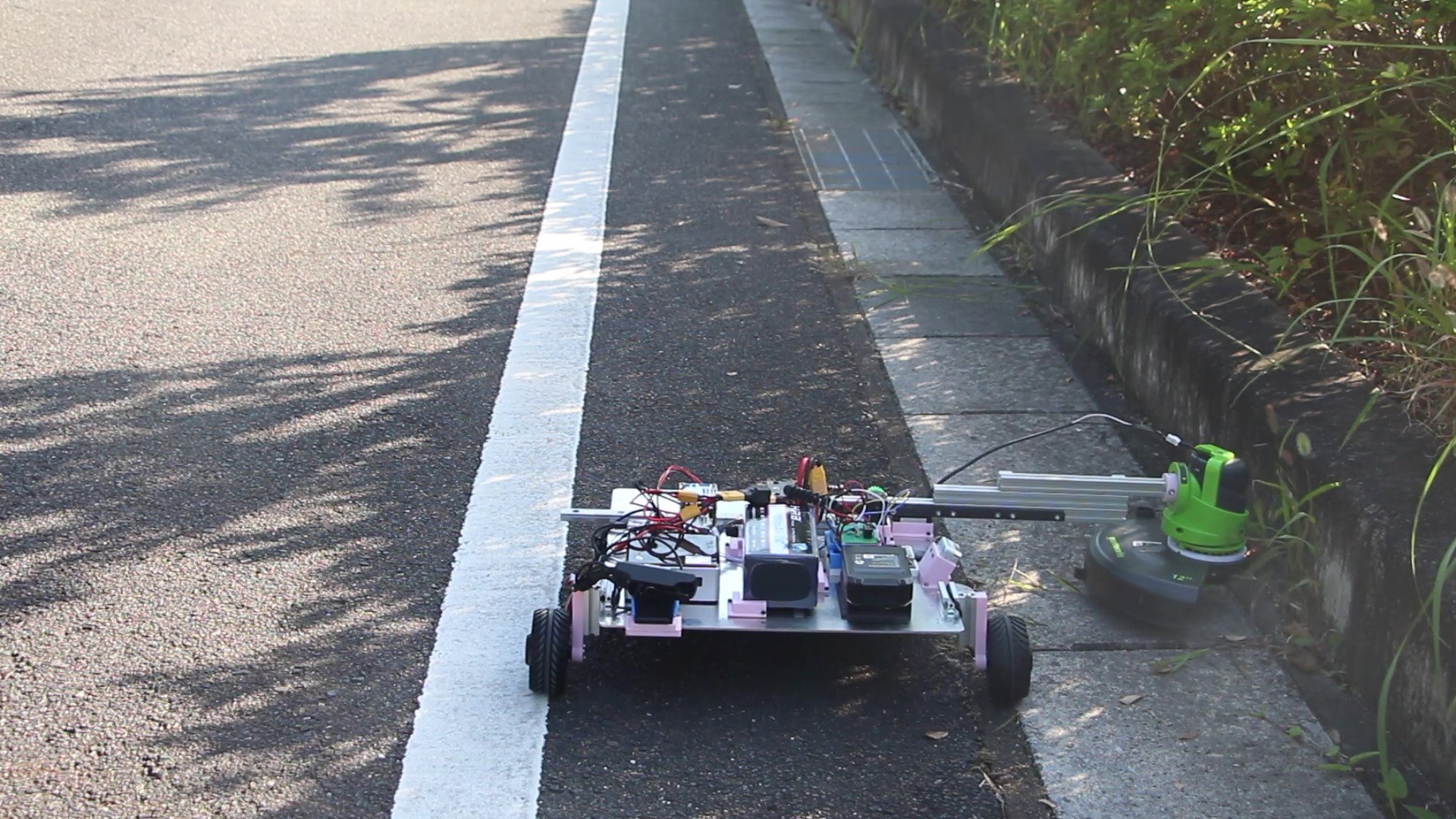
道路除草ロボット(R4)
本研究では道路脇を自律移動しながら、除草作業を行う自律移動除草ロボットR4 (Ritsumeikan Road-weed Removal Robot)を開発しています。ロボティクスと画像処理技術を組み合わせることで、効率的で安全な除草作業の実現を目指しています。

高齢者介護トレーニング用模擬患者ロボット
本研究では、さまざまな医療活動における患者の行動を模倣できるよう設計された模擬患者ロボットを提案します。本ロボットは、患者特有の動作を再現可能なモーター駆動式アームと、訓練生の操作およびパフォーマンスを詳細に記録するセンサー群を搭載しています。ヘッドユニットには、実際の患者行動から得られたトレーニングデータに基づき、患者らしい表情を合成できるダイナミックな顔面投影システムを備えています。身体的な実体性と表情豊かな顔面表現を組み合わせることで、より現実的かつ応答性の高い医療教育環境の提供を目指しています。
Visual Localization and Mapping
カメラを使用した正確な位置推定は、ロボット工学、AR、自律システムなどの多くのアプリケーションにおいて、重要な役割を果たしています。そこで、本研究では、カメラの再位置推定のためにカメラと深層学習を組み合わせた革新的なソリューションを研究しています。

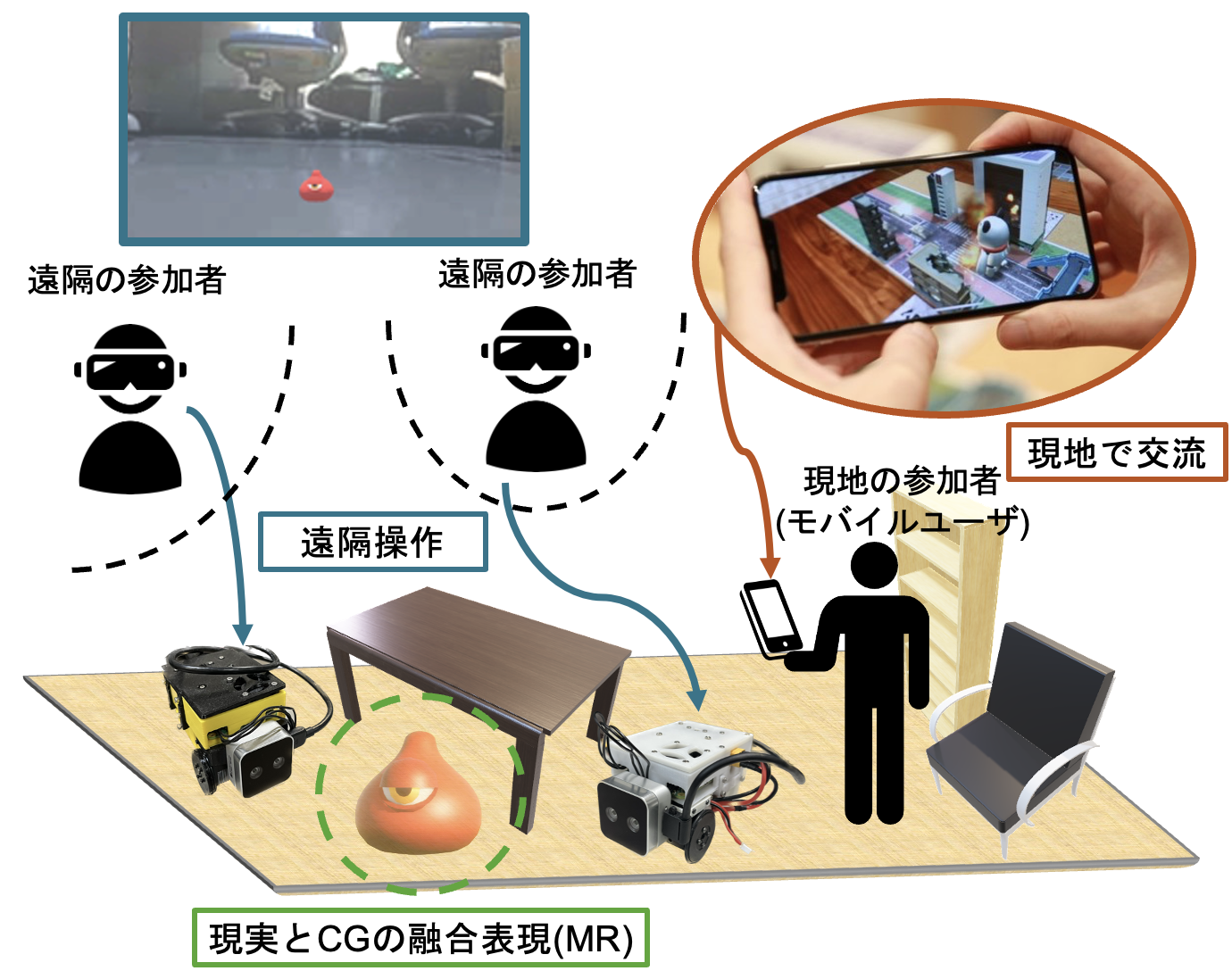
Ritsumei Real-World Robotic Metaverse(R-Metaverse)
R-Metaverseは、遠隔操作ロボット(テレプレゼンスロボット)と現実空間を組み合わせた新たなメタバースです。普段と違うスケールで現実空間を体験したり、テレプレゼンスロボットと同じ空間内に存在する人間と交流したりといった、新しいエンターテイメントの体験をユーザに与えることが期待できます。
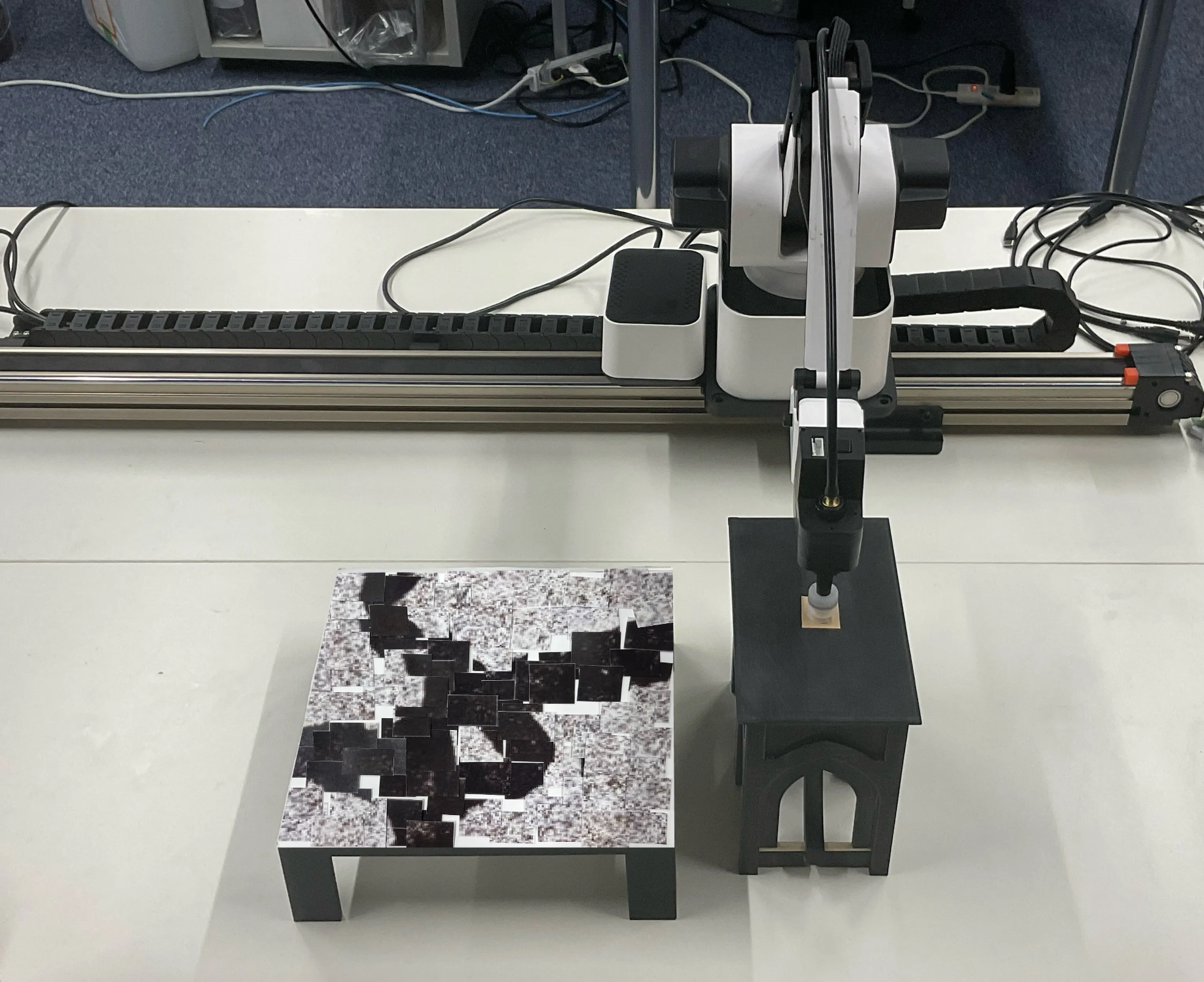
ロボティクスモザイクアートシステム
ロボティクスモザイクアートシステムは、ある画像を複数のパーツに細分化し、ロボットアームがそれらのパーツを適切に配置することでモザイクアートを生成するシステムです。本研究では、ユーザがモザイクアートの生成過程に参加できるインタラクティブな要素を導入し、人間とロボットの協働による参加型アートの実現を目的とします。