道路除草ロボット(R4)
研究背景
現在、日本では高齢化と労働人口の減少により、道路、公園、河川敷などのインフラ維持管理に必要な人員確保が年々困難になっています。特に除草作業は人力に大きく依存しており、炎天下や交通量の多い道路脇での作業は作業員にとって非常に過酷な状況となっています。また、日本の道路は歩道や路肩が狭いため、従来の大型除草機の導入が困難なケースが多く存在します。
このような背景から、本研究では道路脇を自律移動しながら除草作業を行う小型ロボットの開発に取り組んでいます。ロボティクスと画像処理技術を組み合わせることで、効率的で安全な除草作業の実現を目指しています。
自律除草ロボット R4
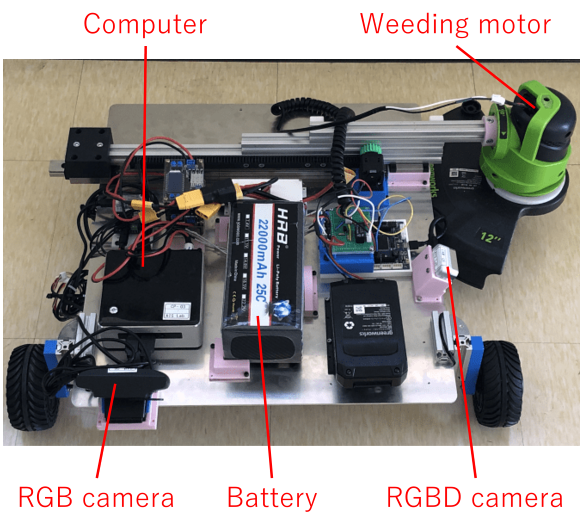
本研究では自律移動除草ロボットR4 (Ritsumeikan Road-weed Removal Robot)を開発しています。
ロボットの横幅は、道路脇の白線から歩道側に収まるよう1m以内に設計されています。これにより、狭い路肩でも車両の交通を妨げることなく作業が可能となります。除草機構には、物理的に雑草を刈り取る方式を採用し、ロボットに除草用のモータを搭載してます。道路脇の雑草は一様に分布しているわけではなく、ロボットと雑草の距離が変動する可能性があるため、除草刃の位置を調整可能な機構を設けています。
自律移動
自律移動には、道路上の目印として白線と道路の境界線を利用します。白線は路肩と車道を明確に区別できるため、白線が存在する場合はこれを主な目印とします。白線がない場合や視認性が低下している場合は、道路の境界線を用いて移動経路を決定します。
道路境界の認識にはセグメンテーションを利用し、カメラ画像から道路領域を識別します。道路の端から一定の距離を維持するように動作させることで、自律移動を実現しています。
除草機能
雑草検出
道路脇の雑草を正確に検出するため、機械学習を利用しています。本研究では,R4の視点に近い横からの視点で撮影された画像に特化した独自の雑草データセットを作成し、モデルに学習させています。これにより、一般的な上空からの視点にもとづくモデルに比べ、R4動作時の雑草認識精度が向上しています。
除草機構
検出された雑草に対しては、R4側面に取り付けられた除草機を用いて処理を行います。雑草検出時にRGBDカメラで、R4から雑草までの距離を計測し、それに応じて除草機の位置を調整します。これにより、雑草がR4から離れている場合でも除草することが可能になります。