Research Topics
Our research focuses on the integration of robotics, deep learning, and computer vision to create intelligent systems that enhance daily life and society. We explore applications across intelligent spaces, autonomous navigation, 3D graphical computing, and related fields, aiming to develop technologies that contribute to a more sustainable and human-centered future.
ON-GOING
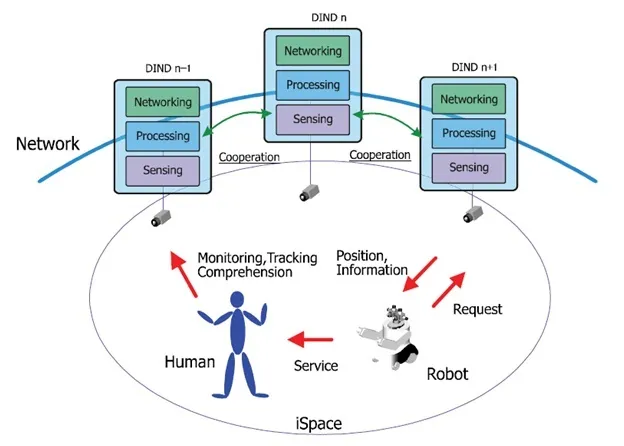
Intellgent Space
Intelligent Space is a research initiative aimed at creating an intelligent environment that actively provides appropriate services through robots and applications, based on the status and past behavior of people living in the space. The research integrates a wide range of technologies, including machine learning, robotics, and image processing.
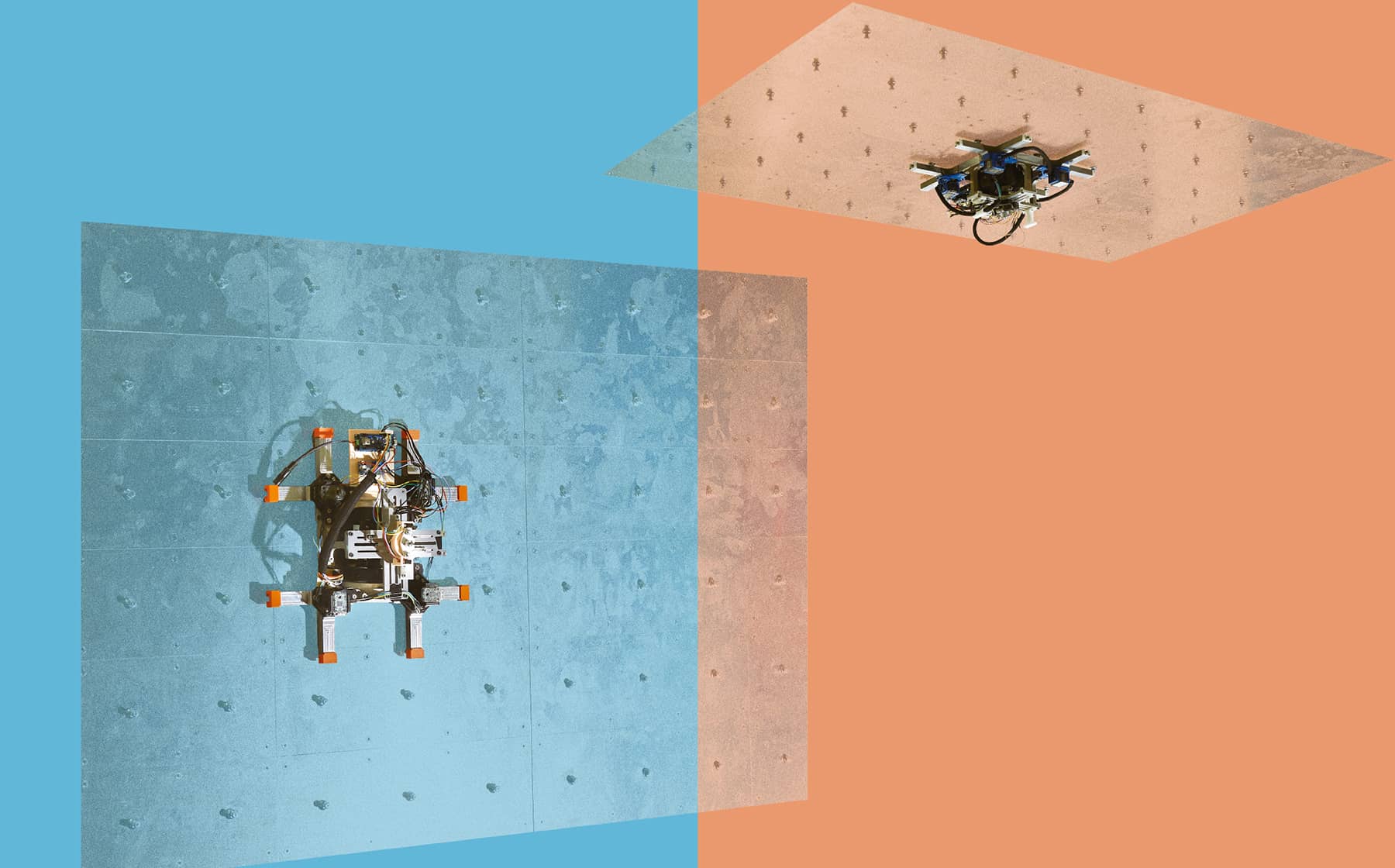
Mobile Module
MoMo is a robot designed to move devices that provide services within an intelligent space. By moving along the ceiling, it can travel without getting in the way of users. To achieve more efficient movement, we are conducting research on mechanical improvements and control algorithms.
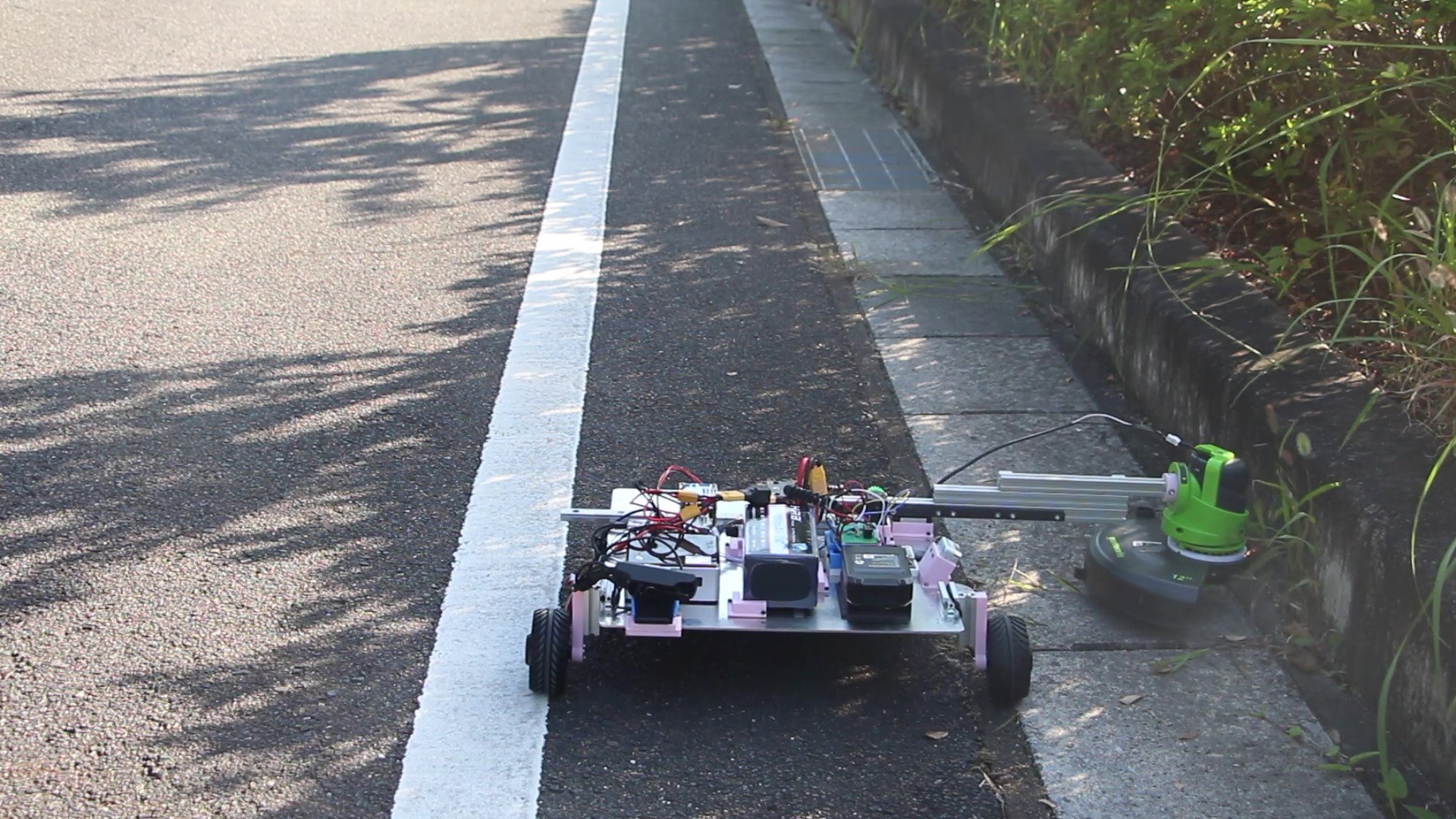
Road Weeding Robot (R4)
In this research, we are developing the autonomous mobile weeding robot R4 (Ritsumeikan Road-weed Removal Robot) , that performs weeding operations while autonomously moving along roadsides. By combining robotics and image processing technology, we aim to achieve efficient and safe weeding operations.

CaTARo - Simulated Patient Robot
We introduce a simulated patient robot that replicates human behaviors in medical training. It features motorized arms and embedded sensors to record trainee performance, while a facial projection system generates patient-like expressions based on real behavioral data, creating a realistic and interactive training environment.
Visual Localization and Mapping
Precise localization using the camera is plays an essential role in many aplications, such as robotics, augmented reality(AR), and autonomous systems. We introduce innovative solutions that combine a camera with deep learning for camera relocalization.

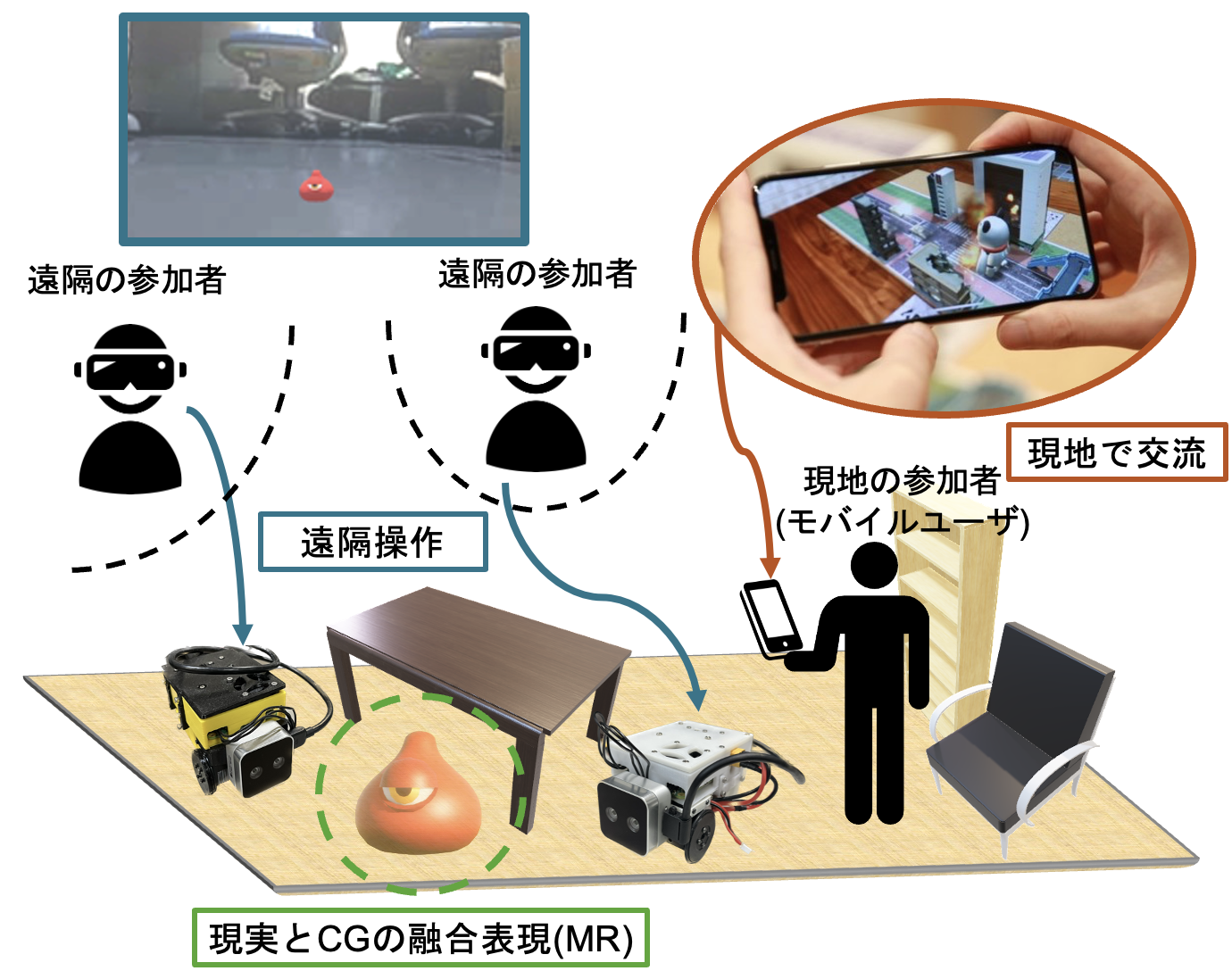
Ritsumei Real-World Robotic Metaverse(R-Metaverse)
R-Metaverse is a new type of metaverse that combines remotely operated robots (telepresence robots) with physical space. It offers users new entertainment experiences, such as experiencing real spaces at scales different from normal, or interacting with humans who exist in the same space as the telepresence robots.
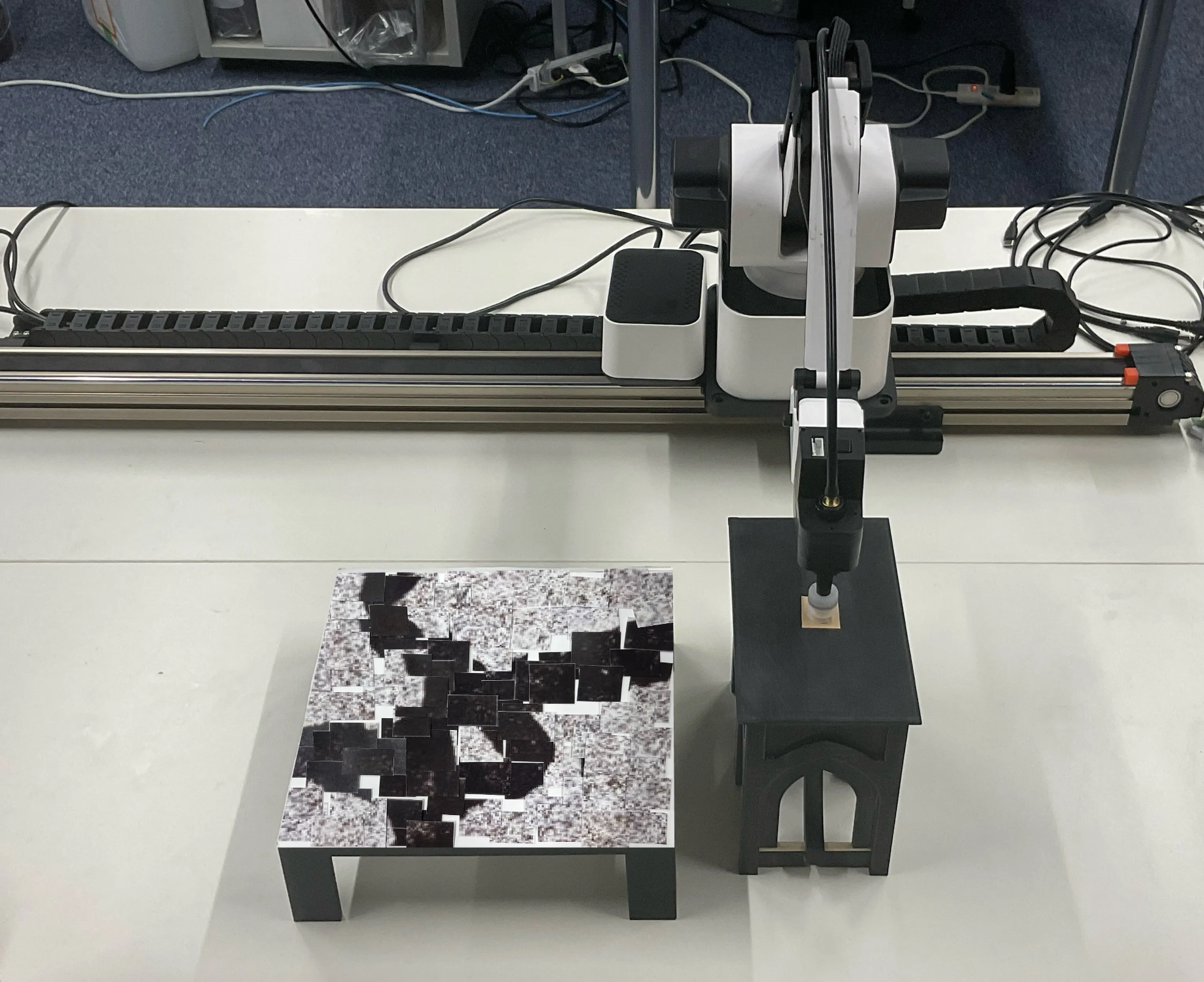
Robotics Mosaic Art System
The Robotic Mosaic Art System is a system that subdivides an image into multiple parts and generates mosaic art by having a robotic arm appropriately place these parts. This research aims to realize participatory art through human-robot collaboration by introducing interactive elements that allow users to participate in the mosaic art generation process.