Road Weeding Robot (R4)
Background
Currently in Japan, the aging population and the decline in the labor force have made it increasingly difficult to allocate sufficient manpower for infrastructure maintenance tasks, such as weeding along roads, in parks, and on riverbanks. Despite this, most weeding operations still rely heavily on manual labor. These tasks are especially demanding for workers, who must often operate under intense heat or in close proximity to busy roads. Moreover, due to the narrow sidewalks and shoulders typical of Japanese roads, the use of conventional large-scale weeding machines is often impractical.
In response to these challenges, this study focuses on the development of a compact robot capable of autonomously removing weeds along roadsides. By integrating robotics with computer vision techniques, we aim to enable safe and efficient weeding operations.
Autonomous Weeding Robot R4
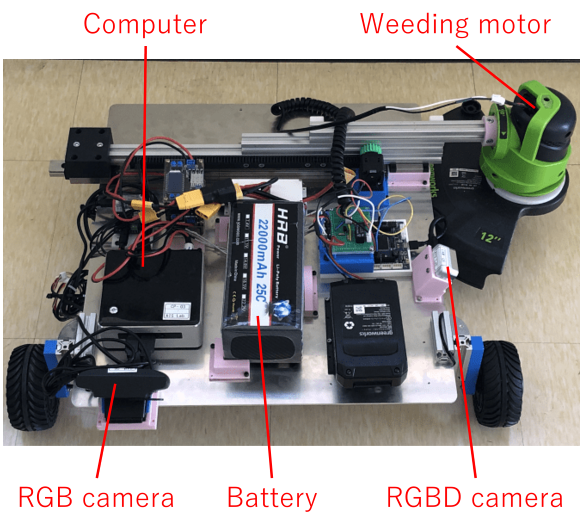
In this research, we are developing the autonomous mobile weeding robot R4 (Ritsumeikan Road-weed Removal Robot).
The robot’s width is designed to be within 1m, allowing it to fit between the roadside white line and the sidewalk. This enables operation even on narrow shoulders without disrupting vehicle traffic. For the weeding mechanism, we have adopted a physical cutting system with a dedicated motor mounted on the robot. Since roadside weeds are not uniformly distributed, and the distance between the robot and weeds may vary, we have incorporated an adjustable positioning mechanism for the cutting blade.
Autonomous Navigation
For autonomous navigation, the robot utilizes visual cues such as road markings and boundary lines. When white lines are present, they serve as the primary reference, as they clearly delineate the shoulder from the roadway. In the absence of white lines or when visibility is low, the robot relies on the road boundary to determine its path.
To recognize road boundaries, a segmentation-based approach is employed to identify the road area from camera images. Autonomous movement is achieved by maintaining a constant distance from the edge of the detected road region.
Weeding Function
Weed Detection
To accurately detect roadside weeds, this study employs machine learning techniques. A custom weed dataset was created using images captured from a lateral viewpoint that closely resembles the R4’s perspective during operation. By training the model on this dataset, weed detection accuracy during real-world R4 operation is significantly improved compared to models trained on conventional top-down imagery.
Weeding Mechanism
Once weeds are detected, a weeding mechanism mounted on the side of R4 is used to physically remove them. An RGBD camera measures the distance between R4 and the weed at the time of detection, and the position of the weeding device is adjusted accordingly. This allows R4 to effectively remove weeds even when they are located farther from its base.