ニュース
私たちの研究室のニュースページへようこそ。
このページでは、研究活動に関する最新情報をお届けしています。主な内容は以下のとおりです:
- 学会発表や招待講演
- 受賞歴・表彰
- 共同研究やアウトリーチ活動
先日、2026年度後期から李研究室に配属される3回生の歓迎会を行いました! ピザやお寿司を囲みながら、新しく加わるメンバー同士や先輩たちとの交流を楽しむことができました。3回生の皆さん、これから一緒に研究に励みながら、充実した研究室生活を送っていきましょう!
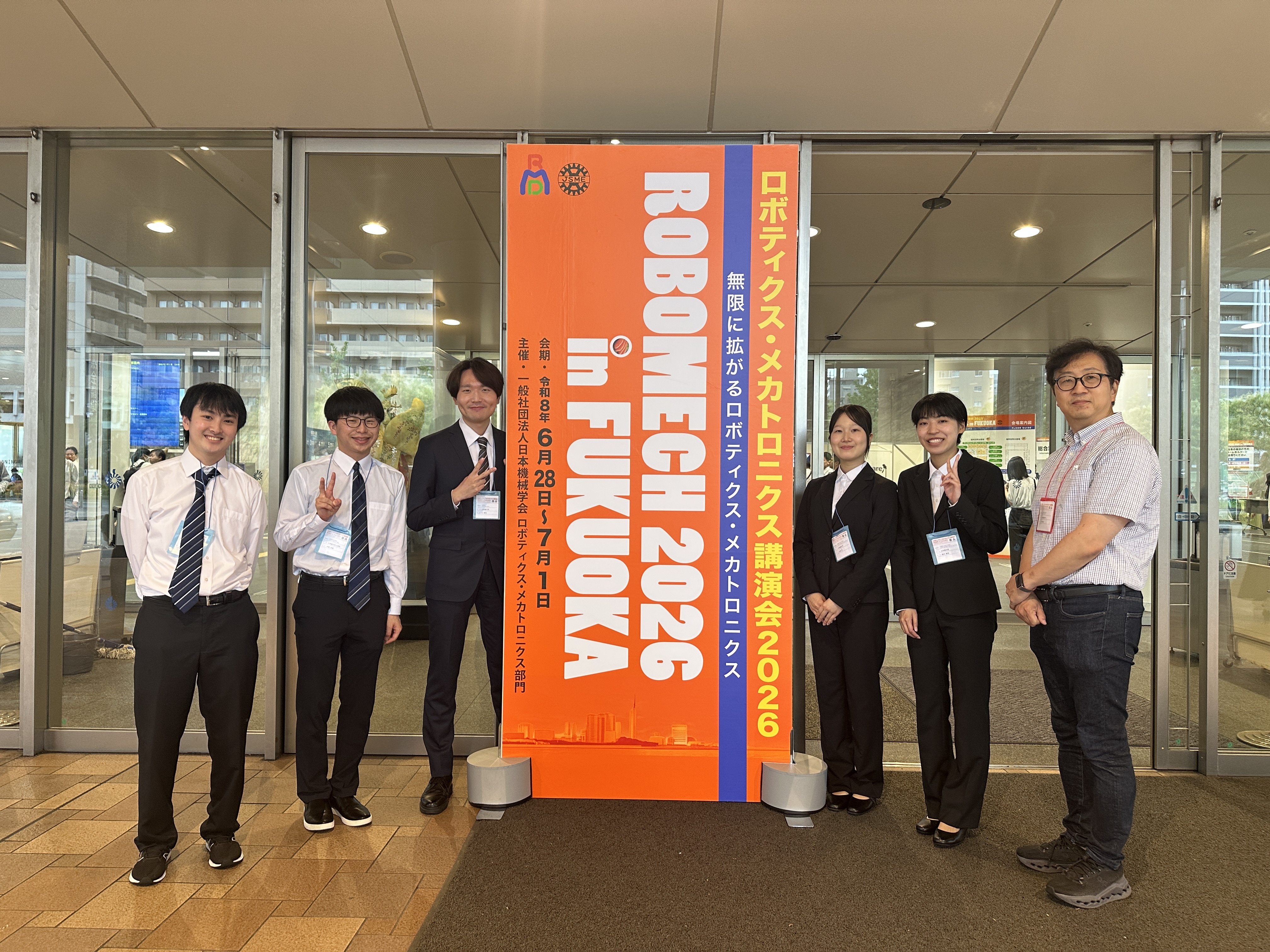
第38回日本機械学会 ロボティクス・メカトロニクス部門講演会(ROBOMECH2026)に参加しました! 5人の李研メンバーが、それぞれの研究成果を発表しました. 発表や他大学の研究者との交流を通して、多くの刺激と学びを得る貴重な機会となりました!

先日、Max Planck Institute for Intelligent Systems(MPI-IS)のPhilip Müller氏による講演会が行われました! 心理学とAIの両面から、人間行動解析に関する最先端の研究を分かりやすくご紹介いただき、参加者にとって大変興味深い講演会となりました! 貴重なお話、ありがとうございました!

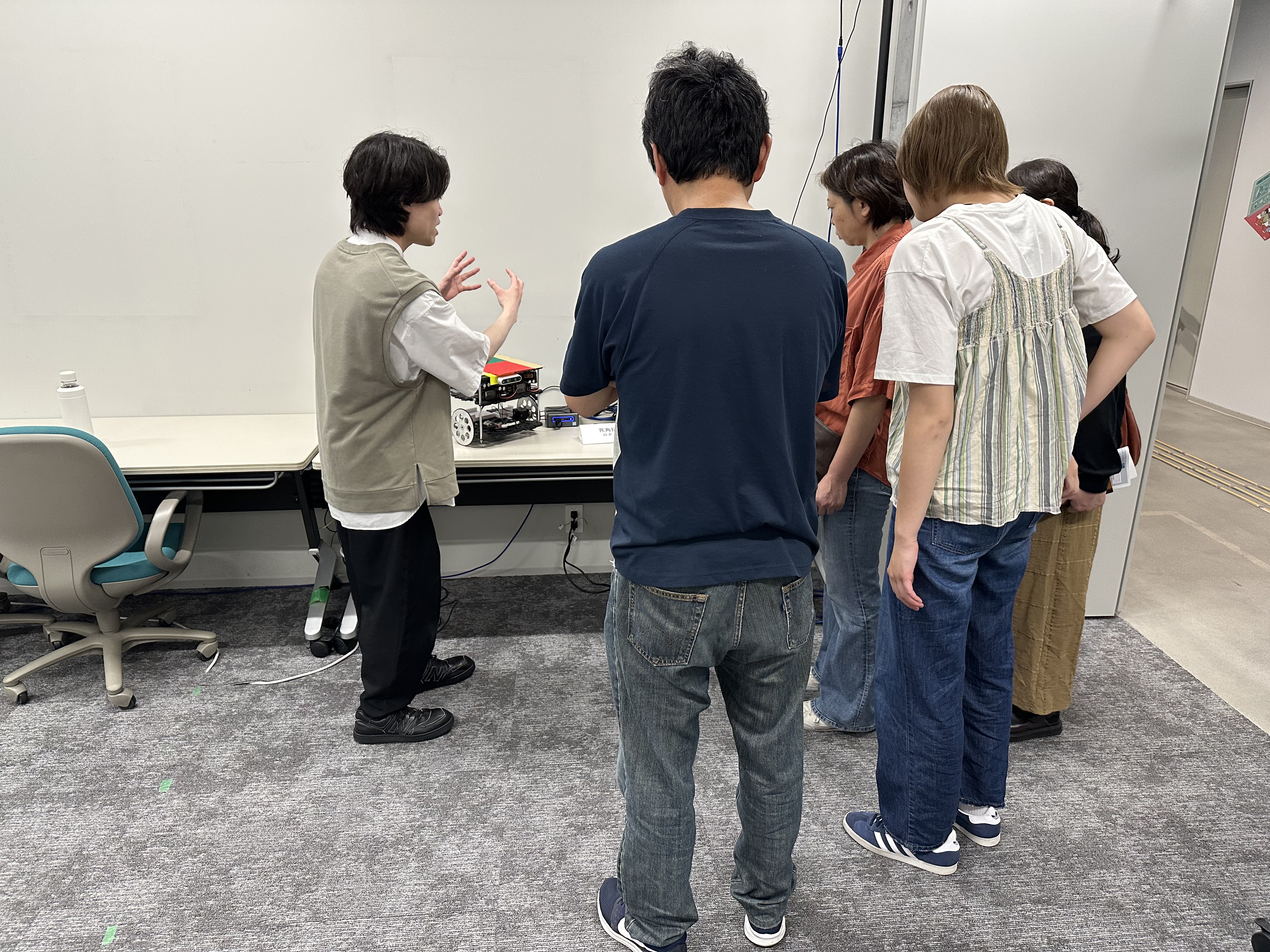
先日、3回生向けに李研究室の見学会を実施し、ロボットや知能化空間に関するデモを紹介しました! 実際に動くロボットや、人に合わせてものが動作する様子を楽しんでもらうことが出来ました! 今後の研究室公開は以下の日程で実施します。

今日は李研究室で留学生歓迎会を開催しました! 世界中から新しい仲間が加わり、ますます多様な研究室になっていきます 美味しい料理や楽しい交流で盛り上がり、打ち解けられた様子でした! これから一緒に新しい発見をしていきましょう!
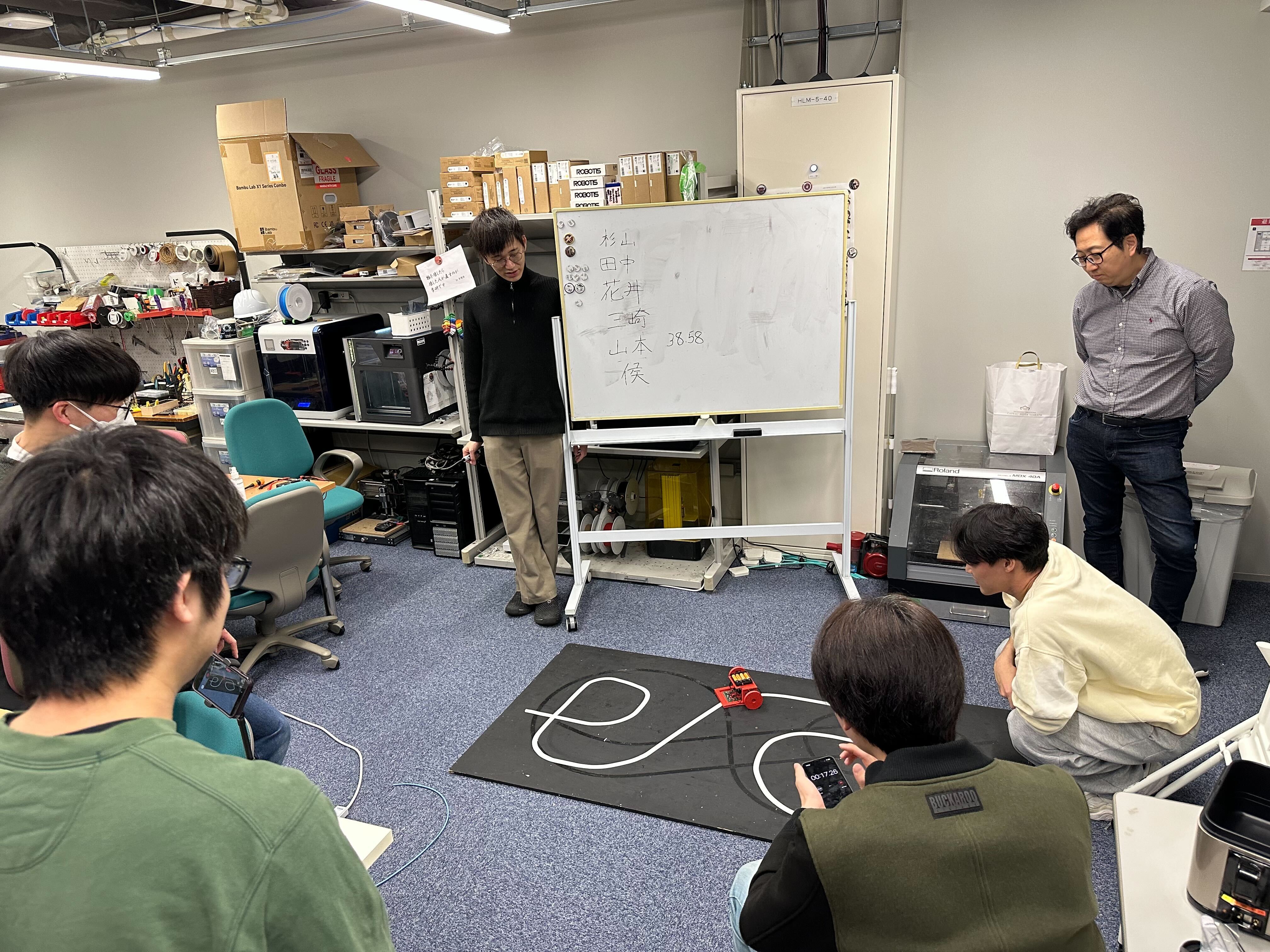
先日、ライントレース大会および春の講習会修了証授与式を開催しました! 春の講習会では、院進志望の新4回生たちがそれぞれライントレースカーの製作に取り組みました。 当日は先生作成の特設コースで、白熱したタイム勝負が繰り広げられました。

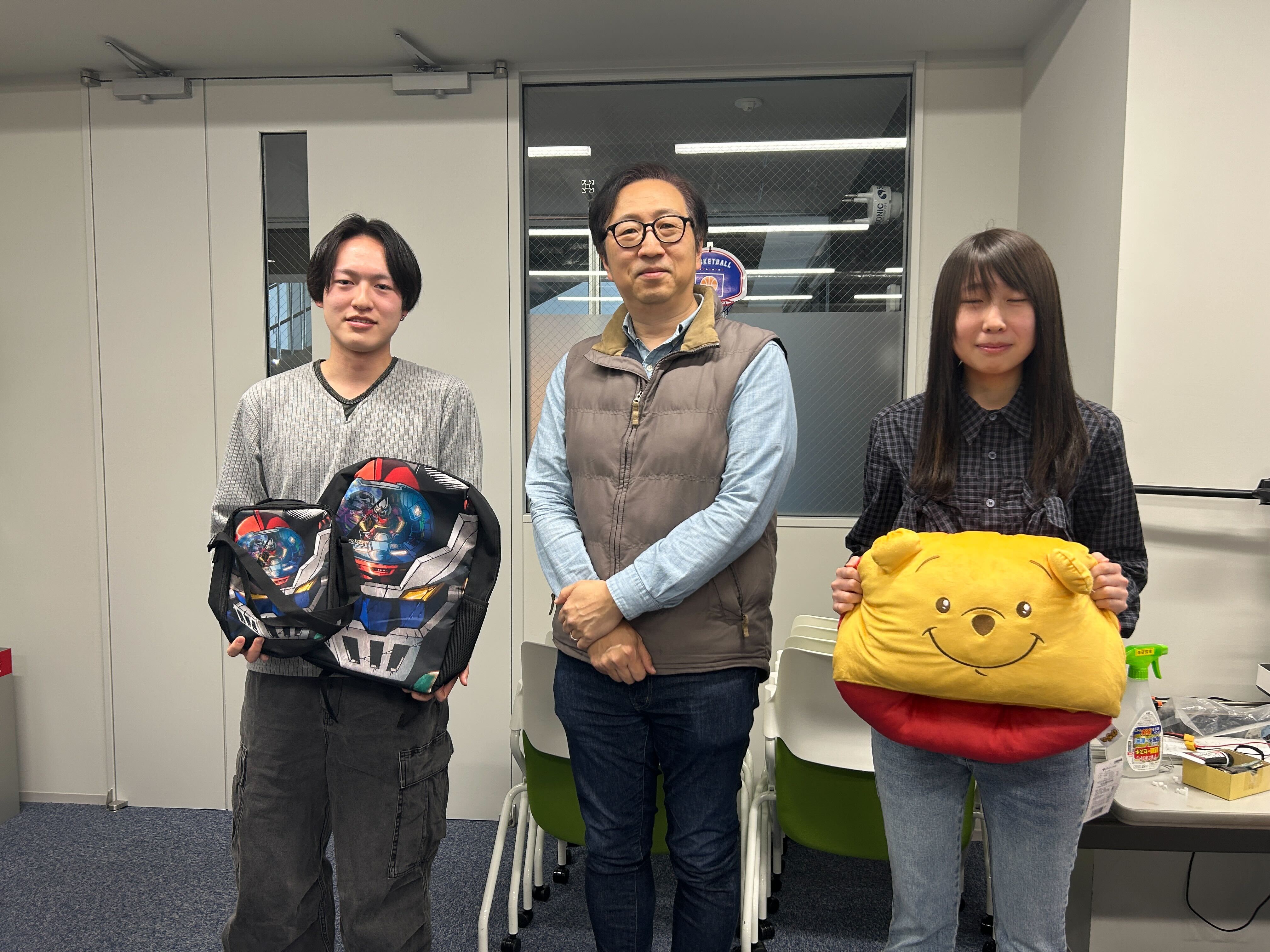
第26回計測自動制御学会システムインテグレーション部門講演会(SI2025)にて、助教の細田先生、D2の吉田さんが優秀講演賞を受賞しました!

先日、大学卒業式・大学院学位授与式が行われました! 卒業・修了された皆さん、本当におめでとうございます! 研究室のみんなでピザパーティーもしました! それぞれの新しい道でも、これからの活躍を応援しています!

R-GIRO「記号創発システム科学創成:実世界人工知能と次世代共生社会の学術融合研究拠点」2025年度 成果報告会 が開催され、李研から 5人 の学生が発表を行いました 日頃の研究成果を発信する貴重な機会となりました! さらに、D1の松下君 が グループ2のポスター発表賞 に選ばれました! おめでとうございます!

先日、空間知能化研究専門委員会の皆様がAIS Labにお越しくださいました。 当日は研究室の最新の研究成果について、実際のデモをご覧いただきながらご紹介しました! 専門家の先生方から鋭いご質問や貴重なフィードバックを多数いただき、私たち学生にとっても非常に刺激的な時間となりました! いただいたアドバイスを今後の研究開発に活かし、さらに技術を磨いていきます! 関係者の皆様、ありがとうございました!

卒論発表・修論発表を終えて、みんなで打ち上げをしました! 長かった研究期間を振り返りつつ、発表をやり切った達成感をみんなで共有しました! 改めて、発表を終えた皆さんお疲れさまでした!
卒業研究発表会・修士論文公聴会が行われました。 これまで取り組んできた研究の成果を発表する、大切な節目の一日となりました。 発表を通して、研究に向き合ってきた時間や努力が伝わる場面が多く見られました 発表されたB4・M2の皆さん、本当にお疲れさまでした!
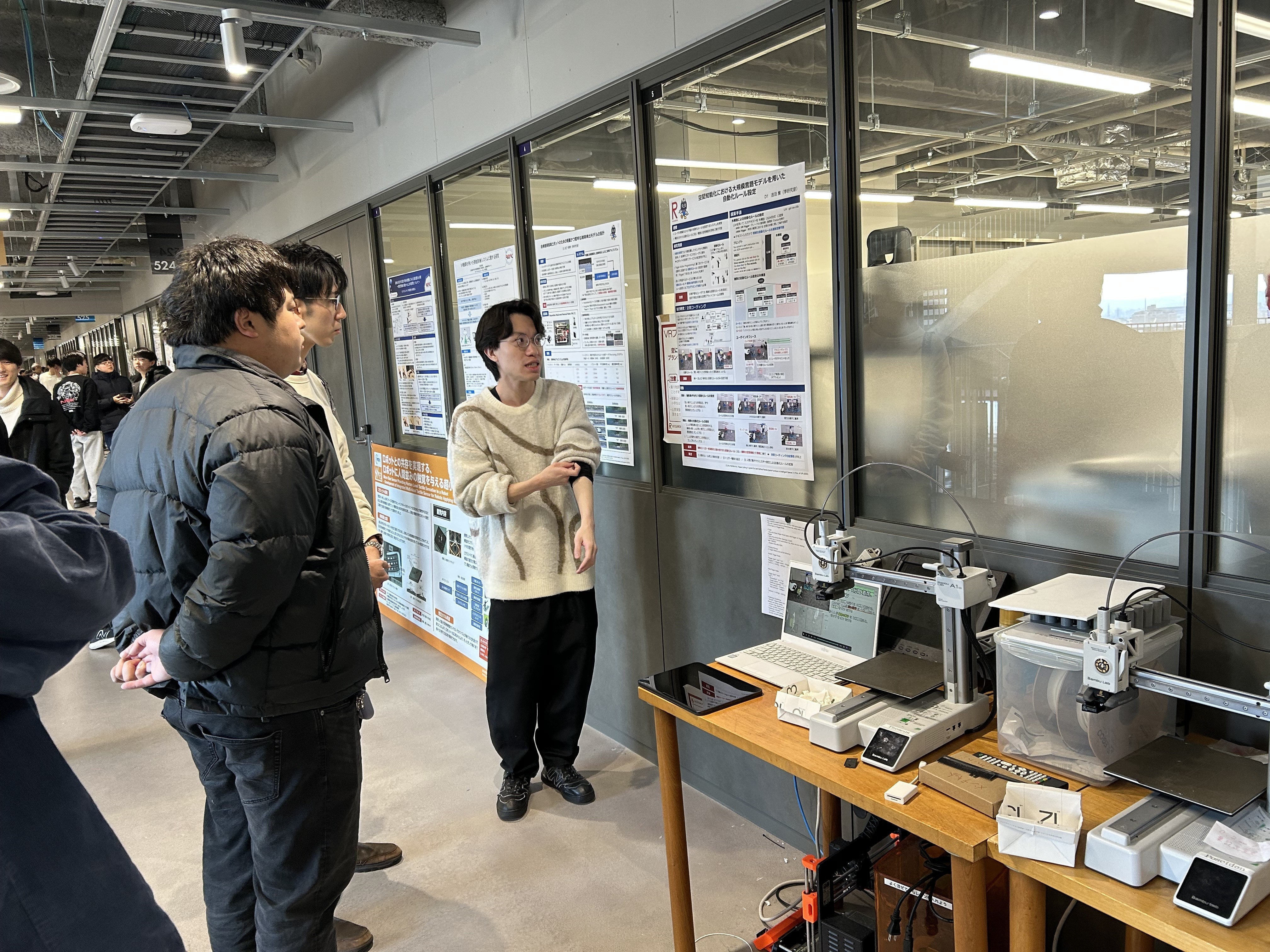
実世界情報コースのテーマ発表会・中間発表会が行われました! H棟5階の廊下がポスター発表会場に中には、実機を用いて発表する人も! それぞれの研究テーマに対する熱意が伝わる発表会となりました

明けましておめでとうございます 先日は、新年が始まって最初のゼミでした! 本年もさらなる発見と成長を目指し、日々取り組んでまいります! 皆さまにとって、幸多き素晴らしい一年になりますように♪今年も李研究室をどうぞよろしくお願いいたします!


研究室で忘年会を開催しました! 研究室メンバーやOBの方々が集まり、世代を超えた交流で楽しいひとときを過ごしました! 研究の話から思い出話まで盛り上がって、笑顔あふれる会になりました!

第26回計測自動制御学会 システムインテグレーション部門講演会(SI2025)に参加しました! 10人の李研メンバーが、それぞれの研究成果を発表しました。 そのうち2人はB4で、学部生として学会発表に挑戦しました! 他大学の研究者の方々との交流もあり、刺激の多い学会となりました!

SI2025の技術交流会にて、教授 李 周浩 先生が SI2026 の紹介を行いました! SI2026は来年 大阪で開催予定で、李先生が実行委員長を務めます 来年の開催に向けて、ますます期待が高まります!

博士研究員のGAOさんの送別会を行いました! 研究や日々の学生生活を通して、たくさんの刺激とパワーをもらい、一緒に過ごした時間は本当にあっという間でした。 新しい場所でも、GAOさんらしくのびのびと活躍されることを研究室一同、心から応援しています!
本日、卒業研究1の2回目の中間発表が行われました! 前回とはロボット部門と画像処理部門の担当が入れ替わり、作品制作を行いました 今回の優勝者は… ロボット部門:田中くん 画像処理部門:侯さん

OIC祭典(立命館大学学園祭2025)にて、SP LAB 8で研究デモを行いました! 人の行動や指示に応じて家電が自動で動くデモや、手を挙げた人のもとへロボットが物を届けるデモなどを紹介しました! ブースは大盛況で、多くの方に体験してもらえました。 足を運んでくださった皆さん、ありがとうございました。
「Ritsumeikan GLOBAL WEEK」に出展し、空間知能化に関するデモを行いました。 立ち寄ってくださった皆さん、ありがとうございました!

EAI ICRESM 2025にて、教授 李周浩先生がキーノート講演を行いました。 講演では、計算能力が限られたロボットやモバイルデバイスを対象とした、ビジョンベースの自己位置推定に関する最新の研究成果を紹介しました。

2025年10月27日にROBOTISのCEOであるByoung Soo Kim様が李研を訪問されました。 日頃の研究成果をCEOに直接見ていただくという貴重な機会に、学生たちはデモを披露しました。 世界をリードする企業のトップの方に研究成果を直接ご覧いただき、議論できたことは、学生たちにとって大変刺激的で貴重な経験となりました。 Byoung Soo Kim様、貴重なお時間をいただき、本当にありがとうございました!

2025年10月20日~10月25日に開催された、The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025) に参加し、本研究室から1件の研究について発表しました。また、Best Paper Awardに受賞しました!おめでとうございます!

2025年9月にBach Thuan BUIさんが博士号を取得しました。おめでとうございます!

2025年9月17日~9月19日に開催されたVRSJ2025(第30回日本バーチャルリアリティ学会大会@立命館大学大阪いばらきキャンパス)にて、李研究室から2件の講演をしました。本研究室の発表にたくさんお集まりいただきありがとうございました!

2025年9月5日、9月6日に中国の大連で開催された、DUT-RU Joint Workshop on Information Sciennce and Engineering 2025(JWISE2025)に参加し、李研からは6名の学生が研究成果を発表しました!
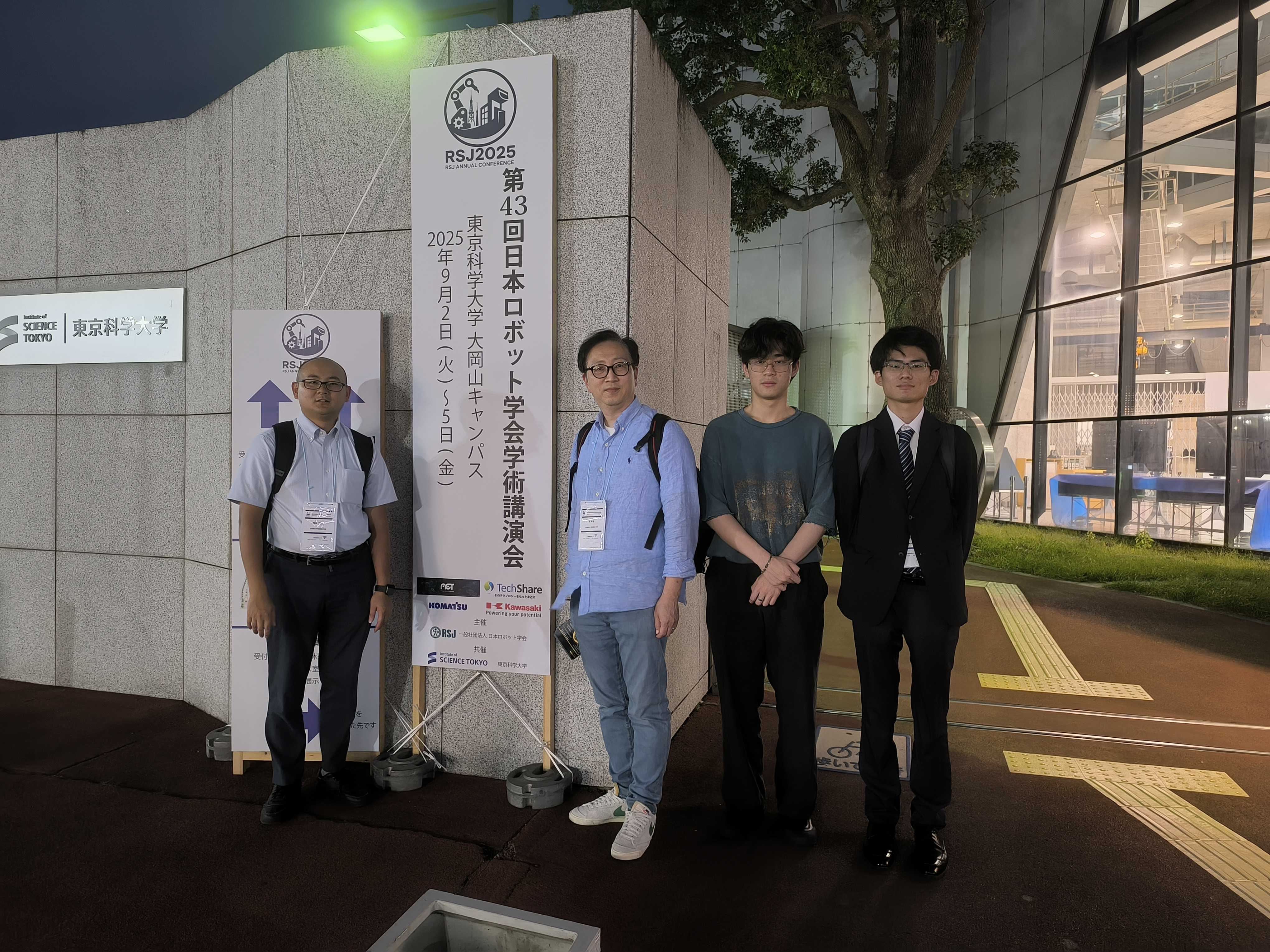
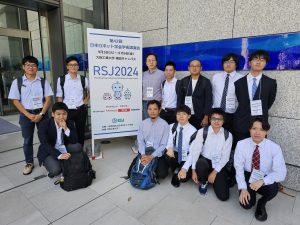
2025年9月2日~9月5日に開催されたRSJ2025(第43回日本ロボット学会学術講演会@東京科学大学大岡山キャンパス)にて、李研究室から3名の学生が研究成果を発表しました!本研究室の発表にたくさんお集まりいただきありがとうございました!

新しく研究室に配属された3回生の歓迎会を実施しました。 おいしいご飯を囲みながら、和やかな雰囲気で親睦を深めました。 これから一緒に研究をがんばっていきましょう!

2025年6月4日~6月7日に開催されたROBOMECH2025(ロボティクス・メカトロニクス 講演会 2025 in Yamagata)にて,李研究室から9件の講演をしました。本研究室の講演にたくさんお集まりいただきありがとうございました。

2025年5月19日~5月23日に開催された,The 2025 IEEE International Conference on Robotics and Automation (ICRA 2025) に参加し,発表しました。本研究室の発表にお集まりいただきまして,ありがとうございました!!
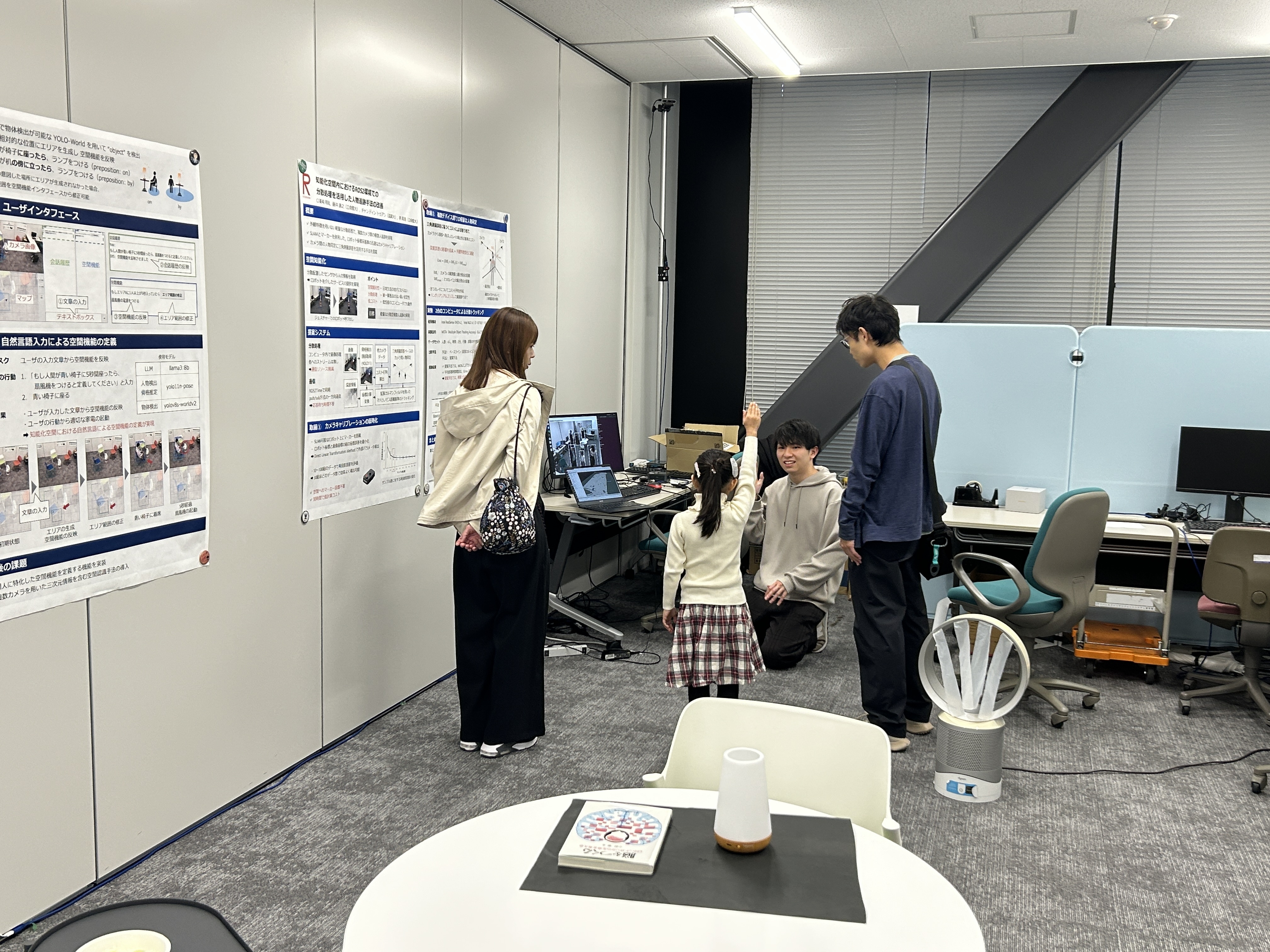
「いばらき×立命館DAY 2025」にて、SP LAB 8で研究でもとロボットの展示を行いました。 幅広い年代の方々にご来場いただき、特に子供たちの反応がとても新鮮で印象的でした。 李研の身近に感じてもらえる貴重な機会となりました。足を運んでくださった皆様、ありがとうございました。

2025年4月より新しい助教として細田 侑也(ほそだ ゆうや)先生が着任されました!

2024年2月3日に4回生10人が卒論発表会で発表し,2024年2月6日に修士2回生3人が修論公聴会で発表しました.情報理工学部がOICに移転して初めての発表でした.修論公聴会の後には慰労会も実施し,互いの努力を称え合いました.皆さんの今後の発展に期待です!お疲れさまでした.

2024年12月18日~12月20日に開催されたSI2024(第25回計測自動制御学会システムインテグレーション部門講演会)にて,李研究室から8件の講演をしました.本研究室の講演にたくさんお集まりいただきありがとうございました.

2024年12月5日(木)にDennis Hong先生(UCLA)が本研究室に訪問され,特別講演をしていただきました.講演では,Hong先生がこれまで研究・開発されてきたロボットの紹介を中心に,ロットに対する前衛的な考え方や研究に対する熱意をお伝えていただきました.また,講演後には本研究室のデモンストレーションをご覧いただき,さまざまなアドバイスをいただいたり,意見交換をしたりしました.お忙しい中,米国より遥々お越しいただきありがとうございました.
2024年12月14日(土)に毎年恒例年末の李研究室忘年会に合わせて,20周年を記念した李先生と研究室卒業生による特別講演を開催しました.今年度で李研究室が発足して20年となります.李先生からはこれまでの20年間を振り返り,李研究室の歴史やOBや学生へのメッセージについてお話していただきました.また,李研究室卒の5人の先輩から貴重なお話をしていただきました.講演後には,学生,OB,教員をを含め50人を越える大勢で忘年会を実施しました.あらためて,参加してくださった先輩方ありがとうございました.来年もみなさんにお会いできること楽しみにしております!

2024年10月14日~10月18日に開催された,The 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024) に参加し,本研究室から2件の研究について発表しました.最新のロボット界隈の研究動向の調査,アブダビ(UAE)での旅を通して有意義な時間を過ごしました!!本研究室の発表にお集まりいただきまして,ありがとうございました!!
2024年9月3日~9月6日に開催された,第42回日本ロボット学会学術講演会(@大阪工業大学梅田キャンパス)にて本研究室から10件の研究について発表しました.本研究室の発表にたくさんお集まりいただきありがとうございました!

2024年度後期から本研究室に迎え入れる新3回生11名の歓迎会を実施しました.当日は9名の新3回生とおよそ30名の現メンバー+教員でピザやオードブルを食べたり,ゲームをして遊んだりして,大いに盛り上がりました.3回生の皆さん,これからの研究室生活楽しんでいきましょう!
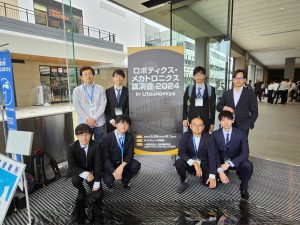
2024年5月30日~5月30日に開催されたROBOMECH2024(ロボティクス・メカトロニクス 講演会 2024 in Utsunomiya)にて,李研究室から7件の講演をしました.本研究室の講演にたくさんお集まりいただきありがとうございました.
M2阪上竜雅くん,藤井康之特任助教が第24回計測自動制御学会システムインテグレーション部門講演会にて優秀講演賞を受賞しました.https://sice-si.org/si2023/excellent_speaker.php

2024年2月1日に4回生8人が卒論発表会で発表し,2024年2月3日に修士2回生7人が修論発表会で発表しました.皆さん,これまでの取り組みをまとめて満足のいく発表ができたでしょうか??皆さんの今後の発展に期待です!お疲れさまでした.

2024年1月8日~11日にHa Long(ベトナム)で開催されたSII2024(The 2024 IEEE/SICE International Symposium on System Integration)で本研究室から4件の研究発表しました.本会議において,博士後期課程2年生のBUI Bach ThuanくんはSIYA-SII2024を受賞しました!研究発表だけでなく,ベトナムでの貴重な体験を楽しみました.

2023年12月14日~12月16日に開催されたSI2023(第24回計測自動制御学会システムインテグレーション部門講演会)にて,李研究室から9件の講演をしました.本研究室の講演にたくさんお集まりいただきありがとうございました.

博士後期課程学生の藤井康之くんが第39回日本ロボット学会学術講演会での講演内容が評価され「若手講演賞」を受賞しました。おめでとうございます!授賞式での藤井さん

李先生がCDO(Chief Data Officer)Magazineが選定した世界のLeading Academic Data Leadersに選ばれました。詳細な内容は以下のリンクからご覧ください。Leading Academic Data Leaders
Thuan Bui Bachさんの論文がISPRS Journal of Photogrammetry and Remote Sensingに掲載されました。ISPRS Journal of Photogrammetry and Remote SensingはImpact Factor 8.979(2022年現在)と、とても影響力のあるトップジャーナルです。論文は、2Dカメラデータを用いた室内用3次元自己位置推定に関する内容で、提案手法が既存の手法より高い精度と性能であることを比較実験で証明しています。ソースコードも公開されているのでご興味のある方は下記の情報もご覧ください。FeatLoc: Absolute pose regressor for indoor 2D sparse features with simplistic view synthesizingThuan Bui Bach, Tuan Tran Dinh, Joo-Ho LeeISPRS Journal of Photogrammetry and Remote Sensing, Volume 189, 2022, Pages 50-62, ISSN 0924-2716,https://doi.org/10.1016/j.isprsjprs.2022.04.021.Abstract: Precise localization using visual sensors is a fundamental requirement in many applications, including robotics, augmented reality, and autonomous systems. Traditionally, the localization problem has been tackled by leveraging 3D-geometry registering approaches. Recently, end-to-end regressor strategies using deep convolutional neural networks have achieved impressive performance, but they do not achieve the same performance as 3D structure-based methods. To some extent, this problem has been tackled by leveraging the beneficial properties of sequential images or geometric constraints. However, these approaches can only achieve a slight improvement. In this work, we address this problem for indoor scenarios, and we argue that regressing the camera pose using sparse feature descriptors could significantly improve the pose regressor performance compared with deep single-feature-vector representation. We propose a novel approach that can directly consume sparse feature descriptors to regress the camera pose effectively. More importantly, we propose a simplistic data augmentation procedure to exploit the sparse descriptors of unseen poses, leading to a remarkable enhancement in the generalization performance. Lastly, we present an extensive evaluation of our method on publicly available indoor datasets. Our FeatLoc achieves 22% and 40% improvements in translation errors on 7-Scenes and 12-Scenes relatively, compared with recent state-of-the-art absolute pose regression-based approaches. Our codes are released at https://github.com/ais-lab/FeatLoc.Keywords: Visual localization; Sparse features; Absolute pose regression
AIS Lab.出身のMiran Leeさんが日本機械学会の女性未来賞を受賞しました。Leeさんは2021年9月に博士号を取得しており、今回の受賞はAIS Lab.での研究活動が評価された結果です。詳細は下記のリンクからご覧ください。2021年度日本機械学会賞ほか受賞者が決定しました!

院生の久郷君と高橋君がSI2021(https://www.sice-si.org/conf/si2021/) で発表した論文で優秀講演賞を受賞しました。
松下由女さんのサーベイ論文がOxford Academy社のJournal of Computational Design and Engineeringに掲載されました。34ページにわたる大作で、近年の機械学習を用いた医療目的の歩行研究を全部網羅しています。医療系の方と機械学習の研究者が歩行というキーワードで歩み寄れる論文です。ご興味のある方はぜひお読みください。Open Accessなので誰もが読めます。Recent use of deep learning techniques in clinical applications based on gait: a survey

2021年10月2日にMiran LEEさんが博士号を取得しました。AIS研究室の第4号博士です。おめでとうございます!

院生の今中君がSI2020(https://www.sice-si.org/conf/si2020/) で発表した論文で優秀講演賞を受賞しました。
国立研究開発法人科学技術振興機構(JST)と文部科学省の共催でイノベーション・ジャパン大学見本市を開催しています。イノベーション・ジャパン大学見本市とは、全国の大学等の技術シーズを一堂に集め企業へ紹介し、産学連携の推進、技術移転のきっかけとなる場を提供することにより、産業活動の活性化を目指す産学連携マッチングイベントです。大学等における研究シーズと産業界のニーズをマッチングさせるイベントとしては国内最大規模になります。本イベントに立命館大学を代表してAISLABの研究テーマの一つであるMobile Moduleで参加しています。詳細は以下のリンクをご覧ください。https://ij2020online.jst.go.jp/exhibitor/un20200422.html

2020/5/28,29の2日間に渡って開催されたROBOMECH2020のオンラインポスターセッションにM1の学生6名が参加しました!今年は新型コロナウイルスの影響でオンラインでの開催となり学会デビューがオンラインとなってしまいましたが、Facebookを通じて他の参加者の皆様の研究をじっくりみることができました!

AIS Lab. M2のRENTERIA ROCHIN Francisco君が学部のページに紹介されました。